









Opencircuit Módulo de interfaz de bus CAN MCP2551
Descripción Archivos adjuntos
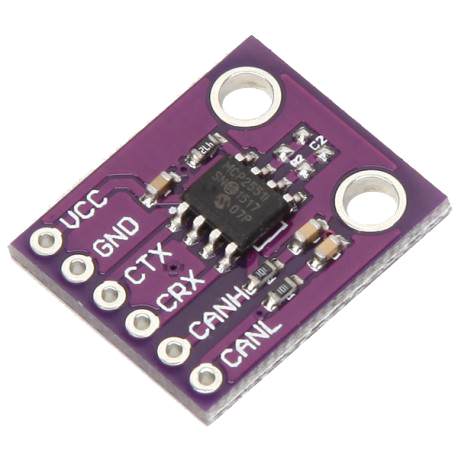
Una red de área de controlador (bus CAN) es un estándar de comunicación, desarrollado principalmente para la comunicación entre todos los microcontroladores del automóvil. Este módulo puede enviar y recibir datos en esta red mediante comandos seriales. Además, este módulo soporta una tasa de datos de 1 MB/S y un voltaje de 12V a 24V.
Propiedades
Información de la marca
| Marca | Opencircuit |
información de tamaño
| Largo | 19 mm |
| Ancho | 16 mm |
| Altura | 3 mm |
| Peso | 2 g |
€ 4,50€ 3,75 Excl. IVA (ES)
Alternativas en stock
 Opencircuit Módulo de interfaz de bus CAN MCP2551 € 4,50
Opencircuit Módulo de interfaz de bus CAN MCP2551 € 4,50 Productos similares
Preguntas y respuestas
Q
Opiniones de los usuarios
Opencircuit Módulo de interfaz de bus CAN MCP2551 ★★★★★Haz clic en una estrella para dejar tu opinión.
- Reducido En stock -78 % Opencircuit Bomba de aire 3V - 6V € 8,50 € 1,85 Ver el producto
- Reducido En stock -50 % Opencircuit Cable plano Macho-Macho 10 cm 40 piezas € 2,80 € 1,40 Ver el producto
- Reducido En stock -81 % Opencircuit Arduino Nano R3 - clon - sin encabezados € 9,70 € 1,85 Ver el producto
- Reducido 2 piezas En stock -49 % Opencircuit Potenciómetro lineal de 2K Ohm - 2 piezas € 1,95 € 1,- Ver el producto
- Reducido 50 piezas En stock -50 % Opencircuit LED de 5 mm blanco cálido - 50 piezas € 2,60 € 1,30 Ver el producto
- Reducido En stock -50 % Opencircuit Cable plano Hembra-Hembra 20 cm 40 piezas € 3,20 € 1,60 Ver el producto
- Reducido 100 piezas En stock -49 % Opencircuit Resistencia de película metálica 100Ω 1/4W - 100 piezas € 2,55 € 1,30 Ver el producto
- Reducido En stock -50 % Opencircuit Cable USB a conector CC de 5,5x2,1 mm - 100 cm € 2,40 € 1,20 Ver el producto
- Reducido En stock -50 % Opencircuit Protoboard transparente 830 puntos € 3,90 € 1,95 Ver el producto
- Reducido En stock -50 % Opencircuit módulo de relé 12v € 3,20 € 1,60 Ver el producto
- Reducido 2 piezas En stock -49 % Opencircuit Potenciómetro lineal de 500 K ohmios - 2 piezas € 1,95 € 1,- Ver el producto
- Reducido 2 piezas En stock -50 % Opencircuit Chips LED de 10W blanco cálido - 2 piezas € 2,90 € 1,45 Ver el producto
- Reducido En stock -50 % Opencircuit Cable plano Macho-Macho 30 cm 40 piezas € 3,60 € 1,80 Ver el producto
- Reducido 5 conjuntos En stock -50 % Opencircuit Interruptor basculante - Encendido / Encendido - 5 piezas € 3,20 € 1,60 Ver el producto
- Reducido 10 piezas En stock -50 % Opencircuit LED difuso blanco cálido de 3 mm - 10 piezas € 2,10 € 1,05 Ver el producto