









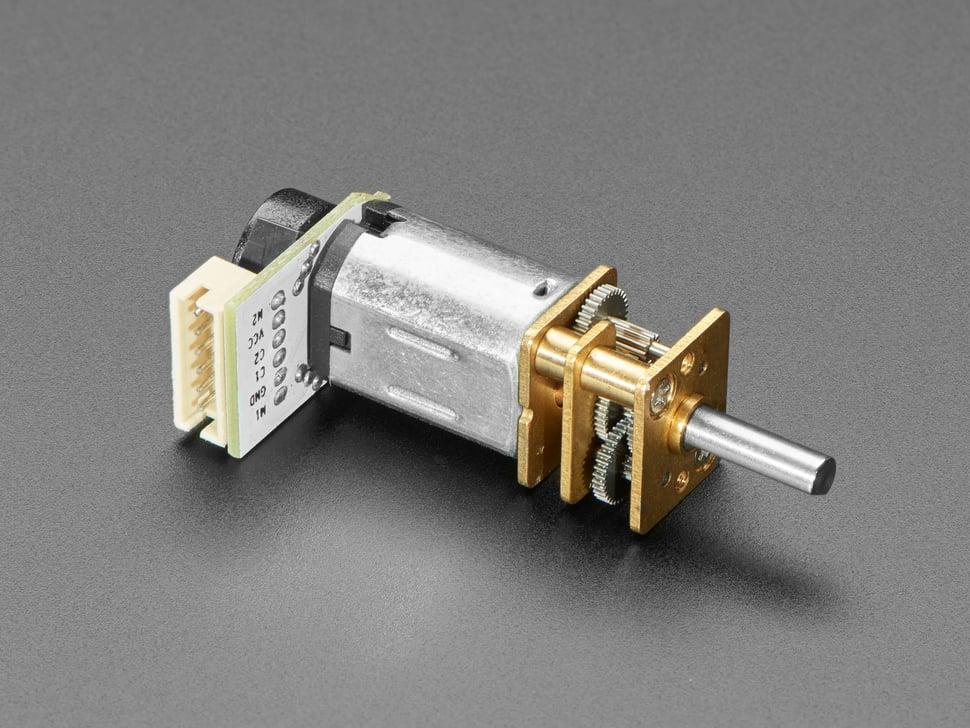
Adafruit Motor CC N20 con codificador magnético - 6 V con relación de engranajes 1:100
Descripción
El primer paso en los proyectos de robótica es poner en marcha un motor. Sin embargo, no todos los motores funcionan a la misma velocidad, incluso con números de pieza idénticos, debido a variaciones en el voltaje, el entorno y la fabricación. El siguiente paso crucial es determinar la velocidad del motor, una tarea compleja que se simplifica añadiendo una rueda codificadora y un contador óptico o magnético. A medida que el motor gira, la rueda codificadora gira, lo que permite al contador detectar cada radio y, por lo tanto, calcular la velocidad. Se puede mejorar la funcionalidad añadiendo un segundo contador para determinar la dirección.
Este motor simplifica el proceso gracias a una rueda magnética integrada y dos sensores de efecto Hall. Al ser un motor compacto de tamaño N20, funciona sin problemas con una alimentación de 4,5 a 6 V CC. Conecte los cables blanco y rojo al controlador del motor para ajustar la velocidad y controlar la dirección mediante PWM y un puente H. El cable azul se conecta a la patilla de tierra del microcontrolador, mientras que el cable negro se adapta a cualquier fuente de 3 a 5 V CC. Las salidas de efecto Hall están disponibles a través de los cables amarillo y verde.
Se proporciona un ejemplo de código Arduino , pero puede adaptarse a otros lenguajes. Consiste en interrumpir uno de los pines del codificador, contar el tiempo transcurrido desde la última interrupción y multiplicar dicho tiempo por 14 pulsos por revolución y la relación de transmisión. Este motor tiene una relación de transmisión de 1:100, consume 6 V nominales y unos 100 mA (200 mA en reposo). La relación de transmisión influye en el par y las RPM, pero no en el consumo de corriente.
Propiedades
| Marca | Adafruit |
| Modelo | 4639 |
Entregado en 10 a 12 días
 Adafruit Motor CC N20 con codificador magnético - 6 V con relación de engranajes 1:100 Entregado en 10 a 12 días € 19,50
Adafruit Motor CC N20 con codificador magnético - 6 V con relación de engranajes 1:100 Entregado en 10 a 12 días € 19,50 Preguntas y respuestas
Opiniones de los usuarios
- Reducido En stock -49 % Adafruit Módulo de retroiluminación LED blanco - Pequeño 12 mm x 40 mm € 2,75 € 1,40 Ver el producto
- Reducido En stock -50 % Adafruit Placa de conexión en ángulo recto SMT de 2 pines JST-PH € 2,10 € 1,05 Ver el producto
- Reducido En stock -49 % Adafruit Mini altavoz de metal con cables - 8 ohm 0.5W € 2,75 € 1,40 Ver el producto
- Reducido En stock -49 % Adafruit Conectores apilables para Feather: conectores hembra de 12 y 16 pines € 1,75 € 0,90 Ver el producto
- Reducido 3 piezas En stock -50 % Adafruit Filamento LED - 3V 26mm de largo - Blanco cálido (Paquete de 3) € 6,35 € 3,20 Ver el producto
- Reducido En stock -49 % Adafruit Filamento LED Flexible de Un Solo Extremo - 3V 25mm de largo - Verde € 3,55 € 1,80 Ver el producto
- Reducido En stock -50 % Adafruit NOOds - Filamento LED Flexible - 3V 300mm largo - Amarillo € 10,45 € 5,25 Ver el producto
- Reducido En stock -50 % Adafruit Ultimate GPS HAT para Raspberry Pi A+/B+/Pi 2/3/4/Pi 5 € 41,70 € 20,85 Ver el producto
- Reducido En stock -50 % Adafruit Juego de cables impermeables polarizados de 4 hilos € 3,50 € 1,75 Ver el producto
- Reducido En stock -50 % Adafruit Sensor de haz de luz infrarroja con extremos de cable premium - LED de 5 mm € 8,30 € 4,15 Ver el producto
- Reducido En stock -49 % Adafruit Altavoz - 3" Diámetro - 4 Ohm 3 Watt € 2,75 € 1,40 Ver el producto
- Reducido En stock -49 % Adafruit Juego de cables de alimentación de CC a prueba de agua - 5,5/2,1 mm € 3,55 € 1,80 Ver el producto
- Reducido En stock -50 % Adafruit NOOds - Filamento LED Flexible - 3V 300mm largo - Rojo € 10,45 € 5,25 Ver el producto
- Reducido 10 piezas En stock -50 % Adafruit Cabezal macho separable de tira de 36 pines de 0,1" - Negro - Paquete de 10 € 6,90 € 3,45 Ver el producto
- Reducido En stock -50 % Adafruit Tela conductora tejida - cuadrado de 20 cm € 6,90 € 3,45 Ver el producto
Artículos vistos recientemente
- Adafruit Motor CC N20 con codificador magnético - 6 V con relación de engranajes 1:100 € 19,50 Ver el producto
- Kit LCD y teclado RGB positivo de 16 x 2 pulgadas Adafruit para Raspberry Pi € 35,75 Ver el producto
- Adafruit Disipador de calor de aluminio Raspberry Pi 4 € 35,75 Ver el producto
- Apple MD3J4ZM/A | Cargador USB-C de 20W | Cargador rápido | Original de Apple | Blanco € 29,40 Ver el producto