









Adafruit Motor CC N20 con codificador magnético - 6 V con relación de engranajes 1:150
Descripción
El primer paso en un proyecto de robótica consiste en hacer girar un motor, lo que permite observar las variaciones de velocidad debidas al voltaje, el entorno y las diferencias de fabricación. Para medir con precisión la velocidad del motor, se puede acoplar una rueda codificadora, junto con un contador óptico o magnético. Esta combinación permite que el microcontrolador cuente los radios que giran y determine la velocidad de forma eficiente.
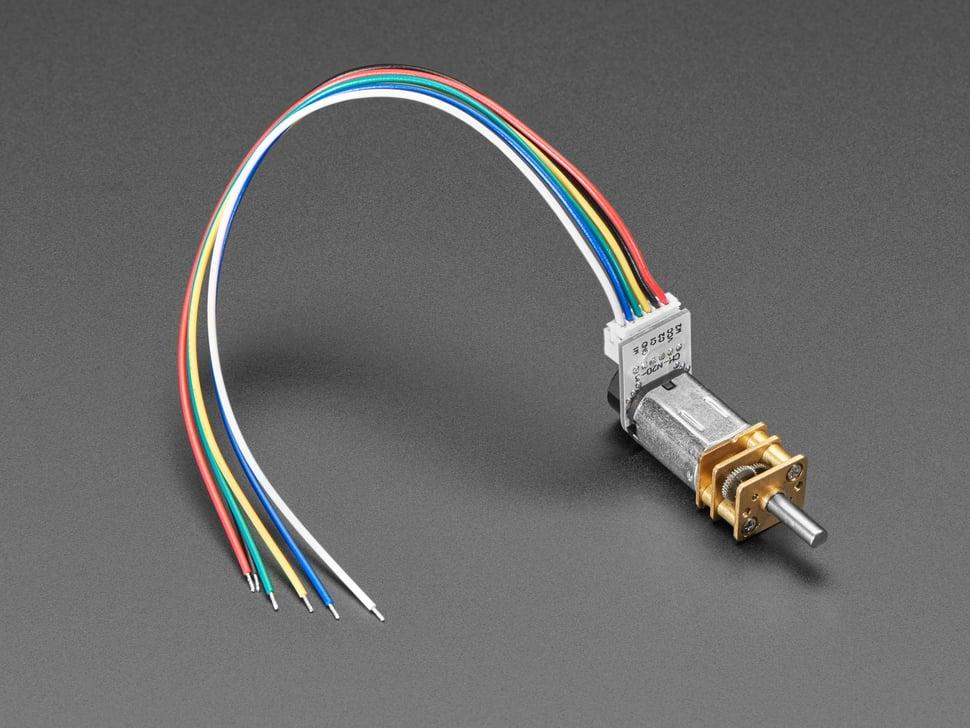
Optimiza tu sistema añadiendo un segundo contador para detectar la dirección junto con la velocidad, simplificando el proceso gracias a nuestro motor de diseño especial. Este motor, además de ser compacto en el tamaño estándar N20, viene equipado con una rueda magnética y dos sensores de efecto Hall preinstalados, lo que garantiza una integración perfecta.
El motor funciona de forma óptima con una alimentación de 4,5 a 6 V CC a través de sus cables blanco y rojo, que se conectan al controlador del motor y permiten el ajuste de velocidad mediante PWM con un puente H. Conecte a tierra el cable azul al microcontrolador, suministre de 3 a 5 V CC al cable negro y lea las señales de efecto Hall de los cables amarillo y verde para obtener una retroalimentación precisa.
Se dispone de un ejemplo de código para Arduino , adaptable a otros lenguajes de programación, que utiliza interrupciones en los pines del codificador para calcular la velocidad. Este motor cuenta con una relación de engranajes de 1:150, requiere una alimentación nominal de 6 V y consume alrededor de 100 mA, con un pico de 200 mA cuando se bloquea. La relación de engranajes ajusta el par y las RPM sin afectar al consumo de corriente, lo que proporciona versatilidad en diversas aplicaciones.
Propiedades
| Marca | Adafruit |
| Modelo | 4640 |
No se conoce ETA
 Adafruit Motor CC N20 con codificador magnético - 6 V con relación de engranajes 1:150 € 15,50
Adafruit Motor CC N20 con codificador magnético - 6 V con relación de engranajes 1:150 € 15,50 Preguntas y respuestas
Opiniones de los usuarios
- En stock Adafruit Módulo de retroiluminación LED blanco - Mediano 23 mm x 75 mm € 3,25 Ver el producto
- En stock Adafruit Juego de cables de alimentación de CC a prueba de agua - 5,5/2,1 mm € 3,25 Ver el producto
- En stock Adafruit Interruptor deslizante SPDT compatible con placa de pruebas € 1,25 Ver el producto
- En stock Adafruit Pequeño piezoeléctrico cerrado con cables € 1,25 Ver el producto
- En stock Adafruit Mini altavoz de metal con cables - 8 ohm 0.5W € 2,50 Ver el producto
- En stock Adafruit Cable JST PH de 2 pines con conector macho de 200 mm € 1,- Ver el producto
- En stock Adafruit Paquete de 6 unidades de cables puente con pinzas de cocodrilo pequeñas a macho. € 6,40 Ver el producto
- En stock Adafruit NOOds - Filamento LED Flexible - 3V 300mm largo - Verde Lima € 8,75 Ver el producto
- En stock Adafruit NOOds - Filamento LED Flexible - 3V 300mm largo - Blanco Cálido € 5,75 Ver el producto
- En stock Adafruit Tela conductora tejida - cuadrado de 20 cm € 6,25 Ver el producto
- En stock Adafruit Filamentos LED flexibles azul de un solo extremo nOOds - 128 mm de largo - 3V € 5,- Ver el producto
- En stock Adafruit Micro Lipo - Cargador USB LiIon/LiPoly € 7,50 Ver el producto
- 5 piezas En stock Adafruit LED NeoPixel Diffused de 5 mm con orificio pasante (paquete de 5) € 6,25 Ver el producto
- En stock Adafruit Conjunto de altavoces estéreo cerrados - 3W 4 Ohm € 9,25 Ver el producto
- En stock Cargador USB /CC/Solar Adafruit bq25185 con placa reductora de 3,3 V € 11,25 Ver el producto
Artículos vistos recientemente
- Adafruit Motor CC N20 con codificador magnético - 6 V con relación de engranajes 1:150 € 15,50 Ver el producto
- Adafruit Kit de mecanizado precortado OpenBeam - Aluminio plateado € 245,75 Ver el producto
- Transmisor FM estéreo Adafruit con conexión RDS/RBDS - Si4713 € 24,50 Ver el producto
- Adafruit Soporte de batería para videocámara Panasonic CGR-D28 y CGA-D54s € 18,50 Ver el producto
- Adafruit Filamento PLA para impresoras 3D - Diámetro 3 mm - Azul - 1 kg € 56,50 Ver el producto
- Adafruit Separadores de latón M2.5 para placas Pi HAT - Chapados en negro - Paquete de 2 € 1,- Ver el producto
- Matriz de píxeles LED RGB de alta densidad Adafruit DotStar 8x8 - 64 LED € 30,75 Ver el producto
- Kit de pantalla LED FeatherWing de matriz 8x16 de 0,8" Adafruit - Verde € 18,50 Ver el producto
- Adafruit Raspberry Pi Pico RP2040 con cabezales sueltos sin soldar € 6,25 Ver el producto
- Adafruit Par de cables de 6 pines con paso de 2,0 mm - Compatibles con JST PH € 1,25 Ver el producto
- Adafruit Bobina de cable trenzado ultrafino - 10 metros - 34 AWG - Negro € 9,25 Ver el producto
- Adafruit Bobina de cable trenzado ultrafino - 10 metros - 36 AWG - Negro € 9,25 Ver el producto
- Adafruit Cable plano IDC de doble fila de 34 pines Rainbow para disquetera - 30 cm de longitud € 3,75 Ver el producto
- Kit de carcasa acrílica Adafruit PyGamer € 15,50 Ver el producto
- Adafruit Placa controladora MOSFET de 4 canales Mosfetti de Monk Makes € 12,25 Ver el producto