









Adafruit Motor CC N20 con codificador magnético - 6 V con relación de engranajes 1:298
Descripción
El primer paso en un proyecto de robótica es poner en marcha un motor. No todos los motores giran a la misma velocidad debido a variaciones en el voltaje, el entorno y el proceso de fabricación. Para determinar la velocidad del motor, se utiliza una rueda codificadora con un contador óptico o magnético que cuenta las rotaciones.
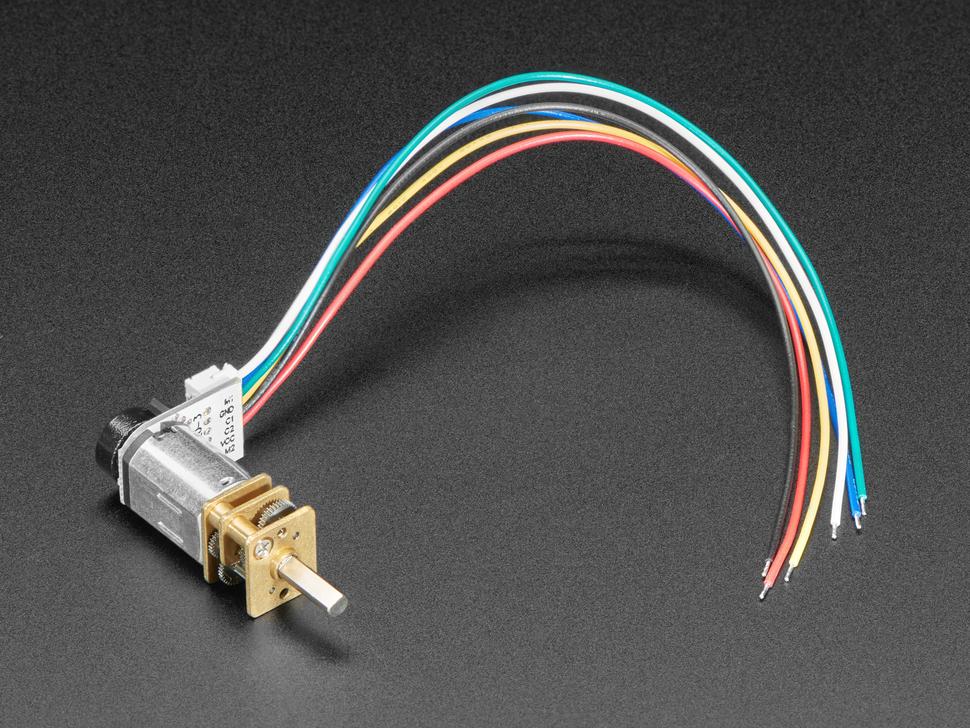
Este motor simplifica el proceso gracias a una rueda magnética integrada y dos sensores de efecto Hall, eliminando el cableado complejo. Es compacto, cabe en el formato N20 estándar y funciona eficientemente con 4,5 a 6 V CC. Las conexiones son sencillas: cables blanco y rojo para el control del motor, compatibilidad con PWM para el ajuste de velocidad, cable azul para tierra y cable negro para la alimentación. Los cables amarillo y verde proporcionan las salidas del codificador.
Se dispone de un ejemplo de programa Arduino , adaptable a otros lenguajes, para el conteo de interrupciones y el cálculo de velocidad con una relación de engranajes de 1:298. El motor consume 6 V nominales, con un consumo aproximado de 100 mA (200 mA en bloqueo), y la variación de la relación de engranajes afecta al par y a las RPM, no al consumo de corriente.
Propiedades
| Marca | Adafruit |
| Modelo | 4641 |
Entregado en 10 a 12 días
 Adafruit Motor CC N20 con codificador magnético - 6 V con relación de engranajes 1:298 Entregado en 10 a 12 días € 19,50
Adafruit Motor CC N20 con codificador magnético - 6 V con relación de engranajes 1:298 Entregado en 10 a 12 días € 19,50 Preguntas y respuestas
Opiniones de los usuarios
- Reducido En stock -49 % Adafruit Módulo de retroiluminación LED blanco - Pequeño 12 mm x 40 mm € 2,75 € 1,40 Ver el producto
- Reducido En stock -50 % Adafruit Placa de conexión en ángulo recto SMT de 2 pines JST-PH € 2,10 € 1,05 Ver el producto
- Reducido En stock -49 % Adafruit Mini altavoz de metal con cables - 8 ohm 0.5W € 2,75 € 1,40 Ver el producto
- Reducido En stock -49 % Adafruit Conectores apilables para Feather: conectores hembra de 12 y 16 pines € 1,75 € 0,90 Ver el producto
- Reducido 3 piezas En stock -50 % Adafruit Filamento LED - 3V 26mm de largo - Blanco cálido (Paquete de 3) € 6,35 € 3,20 Ver el producto
- Reducido En stock -49 % Adafruit Filamento LED Flexible de Un Solo Extremo - 3V 25mm de largo - Verde € 3,55 € 1,80 Ver el producto
- Reducido En stock -50 % Adafruit NOOds - Filamento LED Flexible - 3V 300mm largo - Amarillo € 10,45 € 5,25 Ver el producto
- Reducido En stock -50 % Adafruit Ultimate GPS HAT para Raspberry Pi A+/B+/Pi 2/3/4/Pi 5 € 41,70 € 20,85 Ver el producto
- Reducido En stock -50 % Adafruit Juego de cables impermeables polarizados de 4 hilos € 3,50 € 1,75 Ver el producto
- Reducido En stock -50 % Adafruit Sensor de haz de luz infrarroja con extremos de cable premium - LED de 5 mm € 8,30 € 4,15 Ver el producto
- Reducido En stock -49 % Adafruit Altavoz - 3" Diámetro - 4 Ohm 3 Watt € 2,75 € 1,40 Ver el producto
- Reducido En stock -49 % Adafruit Juego de cables de alimentación de CC a prueba de agua - 5,5/2,1 mm € 3,55 € 1,80 Ver el producto
- Reducido En stock -50 % Adafruit NOOds - Filamento LED Flexible - 3V 300mm largo - Rojo € 10,45 € 5,25 Ver el producto
- Reducido 10 piezas En stock -50 % Adafruit Cabezal macho separable de tira de 36 pines de 0,1" - Negro - Paquete de 10 € 6,90 € 3,45 Ver el producto
- Reducido En stock -50 % Adafruit Tela conductora tejida - cuadrado de 20 cm € 6,90 € 3,45 Ver el producto
Artículos vistos recientemente
- Adafruit Motor CC N20 con codificador magnético - 6 V con relación de engranajes 1:298 € 19,50 Ver el producto
- Matriz de píxeles LED RGB de alta densidad Adafruit DotStar 8x8 - 64 LED € 35,75 Ver el producto
- Caja de acrílico Adafruit 4x4 Trellis Feather + Kit de montaje € 22,50 Ver el producto
- Adafruit Cable delgado de 19 conductores - 1.8 metros / 6 pies de largo € 4,25 Ver el producto