









DFRobot Romeo V2: una placa de control de robot con controlador de motor (compatible con Arduino )
Descripción Enlaces Archivos adjuntos
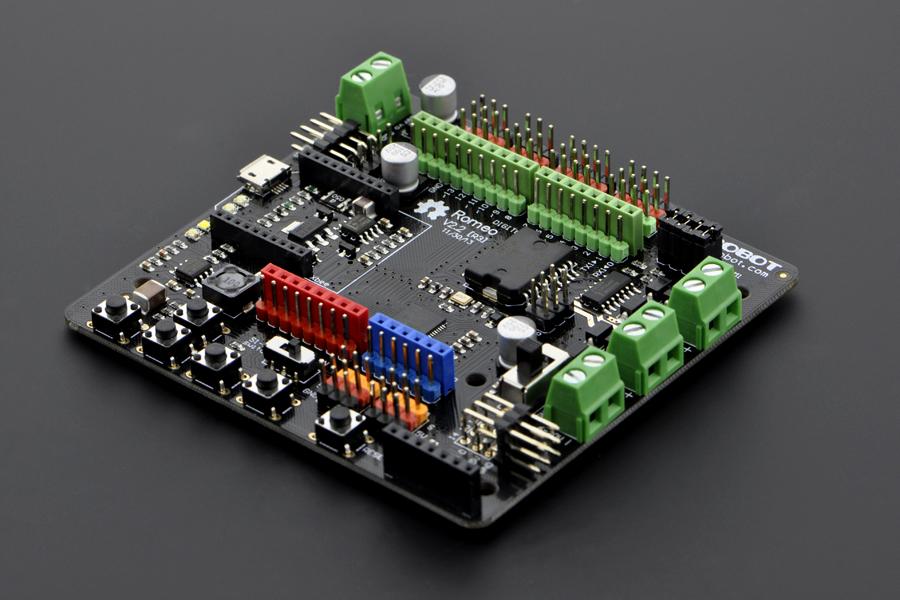
Romeo V2: una placa de control de robot con controlador de motor (compatible con Arduino ), está especialmente diseñada para aplicaciones de robótica y dispositivos extendidos. Romeo se beneficia de la plataforma de código abierto Arduino , es compatible con miles de proyectos de código abierto y se puede ampliar fácilmente con Shields compatibles con Arduino . El controlador de motor de CC de 2 vías integrado y el zócalo Xbee le permiten comenzar su proyecto de inmediato sin la necesidad de un controlador de motor adicional o un escudo inalámbrico.
Otra mejora de Romeo V2 es que admite el control de motores paso a paso. Romeo V2: una placa de control de robot con controlador de motor (compatible con Arduino ) se comporta como Arduino Leonardo basado en el chip ATmega32u4. Puede programarlo directamente desde Arduino IDE 1.0.1 o una versión posterior. Debido a que el ATmega32U4 es el único microcontrolador, Romeo V2 es simple y fácil de usar. El conjunto de chips 32U4 maneja el USB directamente, hay bibliotecas de códigos disponibles que permiten que la placa emule un teclado de computadora, un mouse y más usando el muy interesante protocolo USB -HID. La mejor ventaja es que ATmega32u4 tiene dos puertos seriales que permiten cargar bocetos sin quitar módulos inalámbricos. La depuración ya no es una tarea dolorosa.
Historial de versiones
Características
Especificación
Lista de embarque
Otra mejora de Romeo V2 es que admite el control de motores paso a paso. Romeo V2: una placa de control de robot con controlador de motor (compatible con Arduino ) se comporta como Arduino Leonardo basado en el chip ATmega32u4. Puede programarlo directamente desde Arduino IDE 1.0.1 o una versión posterior. Debido a que el ATmega32U4 es el único microcontrolador, Romeo V2 es simple y fácil de usar. El conjunto de chips 32U4 maneja el USB directamente, hay bibliotecas de códigos disponibles que permiten que la placa emule un teclado de computadora, un mouse y más usando el muy interesante protocolo USB -HID. La mejor ventaja es que ATmega32u4 tiene dos puertos seriales que permiten cargar bocetos sin quitar módulos inalámbricos. La depuración ya no es una tarea dolorosa.
Historial de versiones
- Romeo V2 también mejora la fuente de alimentación, ahora tiene un interruptor para seleccionar la fuente de alimentación, ya sea desde USB o alimentación externa.
- Romeo V2.2 rediseña el sistema de suministro de energía para mejorar la estabilidad del circuito ADC.
Características
- Amplio voltaje de entrada operativo
- Admite directamente los módulos wifi, Bluetooth y RF de factor de forma Xbee y XBee
- Interruptor ON/OFF para controlar la alimentación del sistema desde la alimentación del motor externo
- 3 extensiones de E/S digitales (D14-D16)
- El interruptor S1 - S5 reemplaza la tapa de salto, permite el uso gratuito para el GPIO.
- Micro USB en lugar de conector AB USB
- Puerto de extensión del sensor analógico: naranja para señal, rojo para Vcc, negro para GND
Especificación
- Suministro de CC: alimentado USB o externo de 6 V ~ 23 V CC
- Salida de CC: 5 V (2 A) / 3,3 V CC
- Controlador de motor Corriente de salida continua: 2A
- Microcontrolador: ATmega32u4
- Cargador de arranque: Arduino Leonardo
- Compatible con el mapeo de pines Arduino R3
- Entradas analógicas: A0-A5, A6 - A11 (en pines digitales 4, 6, 8, 9, 10 y 12)
- PWM: 3, 5, 6, 9, 10, 11 y 13. Proporciona salida PWM de 8 bits
- 5 entradas clave para la prueba
- Entrada de alimentación externa de conmutación/detección automática
- Interfaz de serie
- Nivel TTL
- USB
- Admite encabezado de clavija macho y hembra
- Enchufe Xbee incorporado
- Tomas integradas para módulo RF APC220 y módulo DF-Bluetooth
- Tres conjuntos de pines de interfaz I2C/TWI (dos cabezales de pines de 90°)
- Controlador de motor bidireccional con corriente máxima de 2A
- Una unidad de motor paso a paso con corriente máxima de 2A
- Tamaño: 89 x 84 x 14 mm (3,50 x 3,31 x 0,55")
Lista de embarque
- Romeo V2-Controlador todo en uno x1
Propiedades
Información de la marca
| Marca | DFRobot |
| Modelo | DFR0225 |
€ 38,25€ 31,65 Excl. IVA (ES)
Entregado en 5 a 7 días
 DFRobot Romeo V2: una placa de control de robot con controlador de motor (compatible con Arduino ) Entregado en 5 a 7 días € 38,25
DFRobot Romeo V2: una placa de control de robot con controlador de motor (compatible con Arduino ) Entregado en 5 a 7 días € 38,25 Productos similares
Preguntas y respuestas
Q
Opiniones de los usuarios
DFRobot Romeo V2: una placa de control de robot con controlador de motor (compatible con Arduino ) ★★★★★Haz clic en una estrella para dejar tu opinión.
Productos sugeridos
- Reducido En stock -50 % Opencircuit Cable plano Macho-Hembra 20 cm 40 piezas € 2,40 € 1,20 Ver el producto
- Reducido En stock -49 % Opencircuit HC-SR04 Módulo de detección de distancia ultrasónica € 1,95 € 1,- Ver el producto
- Reducido En stock -50 % Opencircuit Cable plano Macho-Hembra 10 cm 40 piezas € 2,- € 1,- Ver el producto
- Arduino MegaRev3 € 55,- Ver el producto
- Rebaja Opencircuit Tarjeta de regalo Ver el producto
- DFRobot Plataforma robótica móvil Devastator Tank (motor de engranajes de CC de metal) € 113,75 Ver el producto
- Reducido En stock -50 % Opencircuit MOSFET de potencia ZVP3306A, canal P, 60 V, 160 mA, 14 ohmios, línea E, orificio pasante € 2,60 € 1,30 Ver el producto
- Acuerdo En stock -73 % DFRobot Gravedad: sensor de colisión digital (derecha) € 2,80 € 0,75 Ver el producto
- Reducido En stock -50 % DFRobot Gravedad: Sensor de calidad del aire SGP40 € 19,35 € 9,70 Ver el producto
- Reducido En stock -50 % DFRobot Gravedad: vatímetro digital I2C € 9,60 € 4,80 Ver el producto
- Reducido En stock -50 % DFRobot Gravedad: Indicador de combustible de batería de litio I2C 3.7V € 13,80 € 6,90 Ver el producto
- Reducido En stock -50 % DFRobot MmWave - Sensor de detección de presencia humana (9 metros) € 40,30 € 20,15 Ver el producto
- Reducido En stock -50 % DFRobot Sensor fotoeléctrico de nivel de agua/líquido por gravedad para Arduino € 9,60 € 4,80 Ver el producto
- Reducido En stock -50 % DFRobot Carcasa metálica de refrigeración con disipador de calor (compatible con la placa base del router IoT Raspberry Pi CM4) € 27,65 € 13,85 Ver el producto
- Reducido En stock -50 % DFRobot Gravedad: Botón LED - Amarillo-Naranja € 6,25 € 3,15 Ver el producto
- Reducido En stock -50 % DFRobot Gravedad: sensor analógico de temperatura y humedad SHT30 € 9,60 € 4,80 Ver el producto
- Reducido En stock -50 % DFRobot Cargador Lipo-MicroUSB € 8,20 € 4,10 Ver el producto
- Reducido En stock -50 % DFRobot Gravedad: sensor de inclinación digital de 360° para Arduino € 3,50 € 1,75 Ver el producto
- Reducido En stock -50 % DFRobot Gravedad: sensor de vibración de disco piezoeléctrico digital € 6,25 € 3,15 Ver el producto
- Reducido En stock -49 % DFRobot Gravedad: pulsador digital (verde) € 2,75 € 1,40 Ver el producto
- Reducido En stock -50 % DFRobot Sensor óptico de turbidez sin contacto UART para Arduino € 13,80 € 6,90 Ver el producto
- Reducido En stock -49 % DFRobot Gravedad: gesto y sensor táctil € 4,85 € 2,45 Ver el producto