









Placa base Sparkfun RedBot
Descripción Archivos adjuntos
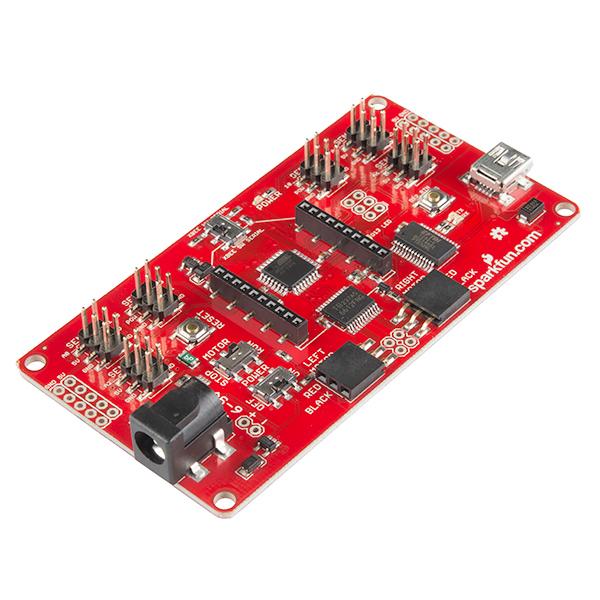
La placa base Sparkfun RedBot es una plataforma de desarrollo robótico versátil compatible con Arduino IDE. Combina un controlador de motor y Arduino , completo con una variedad de encabezados y conexiones, lo que elimina la necesidad de múltiples escudos apilados. Diseñe su propio robot utilizando placas accesorias RedBot y su chasis preferido para cumplir con sus requisitos específicos.El RedBot está preprogramado con el gestor de arranque Optiboot (Uno). Se puede programar en el IDE Arduino mediante un cable USB mini-B utilizando el código de ejemplo de Sparkfun o el suyo propio. Las capacidades de la placa base se pueden mejorar aún más con los sensores adicionales opcionales, que se conectan mediante cabezales de 6 pines o cables de puente.La placa base Sparkfun RedBot es parte de la extensa familia de productos RedBot.La placa base RedBot cuenta con las siguientes características:- Lógica de 5 V - Voltaje de entrada de 6-9 V a través de conector cilíndrico o conector de 2 pines - ATmega328P (preprogramado) - Controlador de motor de CC dual TB6612FNG - USB programable a través de FTDI - Puerto XBee con interruptor serie HW/SW - 2 hembras de 3 pines Puerto del motor: 2 cabezales de servo macho opcionales de 6 pines: 4 cabezales de sensor opcionales macho de 6 pinesPara obtener más información, consulte los siguientes documentos:- Esquema - Archivos Eagle - Guía de experimentos de RedBot - Guía de ensamblaje del chasis RedBot Shadow - Hoja de datos (ATmega328P) - Hoja de datos (TB6612FNG) - Hoja de datos (FT232R) - GitHub (archivos de diseño y código de ejemplo) - GitHub (biblioteca)
Propiedades
Información de la marca
| Marca | Sparkfun |
| Modelo | ROB-12097 |
| Más información | GitHub - sparkfun/RedBot: Design files and firmware files for the RedBot robotics board. |
información de tamaño
| Largo | 119 mm |
| Ancho | 150 mm |
| Altura | 14 mm |
| Peso | 62,2 g |
€ 23,25€ 19,25 Excl. IVA (ES)
 Placa base Sparkfun RedBot € 23,25
Placa base Sparkfun RedBot € 23,25 Preguntas y respuestas
Q
Opiniones de los usuarios
Placa base Sparkfun RedBot ★★★★★Haz clic en una estrella para dejar tu opinión.
- Reducido En stock -40 % Sparkfun Interruptor de palanca y cubierta: iluminado (rojo) € 6,50 € 3,90 Ver el producto
- Reducido En stock -40 % Sparkfun Conector Qwiic JST - SMD de 4 pines (vertical) € 1,25 € 0,75 Ver el producto
- Reducido En stock -40 % Sparkfun Cinta de Cobre - Adhesivo Conductivo, 5mm - 15 metros € 8,75 € 5,25 Ver el producto
- Reducido En stock -40 % Sensor de distancia Sparkfun - 1,3 metros, VL53L4CD (Qwiic) € 30,75 € 18,45 Ver el producto
- Reducido En stock -40 % Sparkfun Kit de encabezados Raspberry Pi Pico € 2,25 € 1,35 Ver el producto
- Reducido En stock -40 % Sparkfun Cable de conexión: marrón (22 AWG) € 5,25 € 3,15 Ver el producto
- Reducido En stock -40 % Sparkfun Kit de cabecera apilable Arduino - R3 € 3,75 € 2,25 Ver el producto
- Reducido En stock -40 % Sparkfun Cable Flexible Qwiic - 200mm € 3,10 € 1,85 Ver el producto
- Reducido En stock -40 % Sparkfun Interruptor basculante - SPST (ángulo recto) € 1,75 € 1,05 Ver el producto
- Reducido 2 piezas En stock -40 % Sparkfun Juego de cabezales apilables ESP32 Thing € 3,50 € 2,10 Ver el producto
- Reducido En stock -40 % Sparkfun Cable de conexión: amarillo (22 AWG) € 4,50 € 2,70 Ver el producto
- Reducido En stock -40 % Sparkfun Altavoz delgado - 0,5 W € 2,25 € 1,35 Ver el producto
- Reducido En stock -40 % Barómetro digital absoluto Sparkfun - LPS28DFW (Qwiic) € 27,25 € 16,35 Ver el producto
- Reducido En stock -40 % Sparkfun Cables de prueba de cocodrilo: multicolores (paquete de 10) € 7,25 € 4,35 Ver el producto
- Reducido En stock -40 % Desbloqueo de IMU Sparkfun 6DoF - BMI270 (Qwiic) € 25,50 € 15,30 Ver el producto