









DFRobot Gravedad: controlador de motor de CC de 2 x 1,2 A con conector de gravedad (TB6612FNG)
Descripción
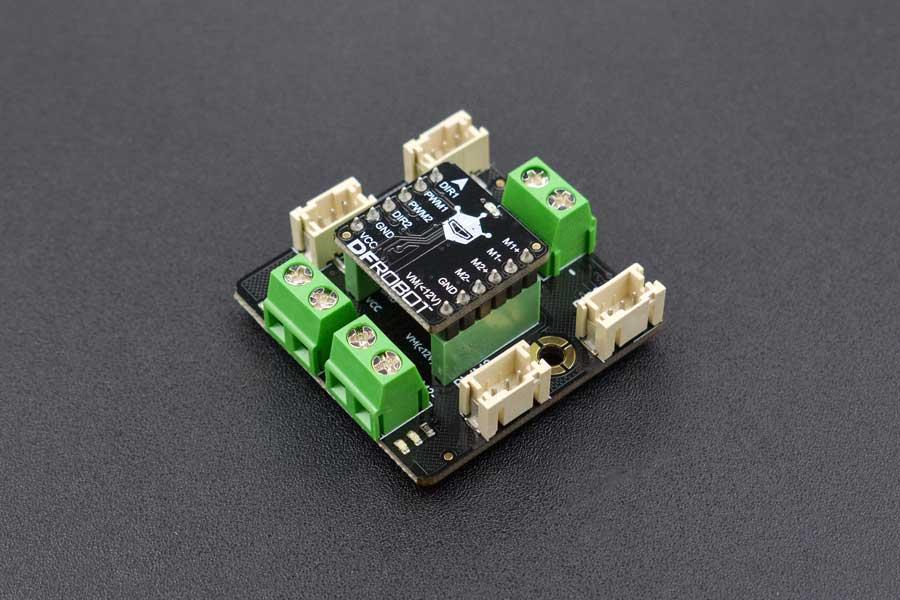
Este microcontrolador de motor de CC de dos vías DFRobot con conector Gravity. Su diseño se basa en el chip de controlador de motor TB6612FNG. Hereda la lógica de control del motor DFRobot L298N, que solo necesita cuatro pines para impulsar 2 motores. La versión con conector Gravity amplía cuatro GPIO con conector Gravity estándar. Una vez que use la placa de expansión Gravity IO, será bastante conveniente.
TB6612FNG es un chip de unidad de puente completo de dos canales. La corriente máxima de accionamiento continuo de un solo canal puede alcanzar 1,2 A, valor máximo 2 A/3,2 A (pulso continuo/pulso único), que puede impulsar algunos micromotores de CC. La lógica de control es similar a L298n y el código puede ser directamente compatible con el controlador de motor DFRobot L298N. El pin estándar XH2.54 se puede insertar directamente en la placa de prueba. Es una buena opción para proyectos de bricolaje o desarrollos de productos. Si necesita algún módulo pequeño, también puede usar el módulo TB6612FNG por separado.
Características
TB6612FNG es un chip de unidad de puente completo de dos canales. La corriente máxima de accionamiento continuo de un solo canal puede alcanzar 1,2 A, valor máximo 2 A/3,2 A (pulso continuo/pulso único), que puede impulsar algunos micromotores de CC. La lógica de control es similar a L298n y el código puede ser directamente compatible con el controlador de motor DFRobot L298N. El pin estándar XH2.54 se puede insertar directamente en la placa de prueba. Es una buena opción para proyectos de bricolaje o desarrollos de productos. Si necesita algún módulo pequeño, también puede usar el módulo TB6612FNG por separado.
Características
- Puertos de gravedad Plug and play
- Solo se requieren cuatro cables para accionar dos motores.
- El método de control es compatible con Romeo, el código se puede trasplantar directamente
- Voltaje de funcionamiento VCC: 2,7 V ~ 5,5 V.
- Potencia de entrada de máquina virtual: 2,5 V ~ 12 V
- Canal del controlador: 2 canales
- Corriente de salida: 1,2 A (corriente de accionamiento continua de un solo canal)
- Corriente de inicio / pico: 2A (pulso continuo) / 3.2A (pulso único)
- Dimensión: 1,57x1,57 (pulgadas) / 40 × 40 (mm)
- Controlador de motor de CC dual (TB6612) (cabezales presoldados) x1
- Placa de expansión del controlador de motor con conector de gravedad x1
- Cable de sensor analógico de gravedad x4
Propiedades
Información de la marca
| Marca | DFRobot |
| Modelo | DRI0044-A |
€ 11,60€ 9,60 Excl. IVA (ES)
No se conoce ETA
 DFRobot Gravedad: controlador de motor de CC de 2 x 1,2 A con conector de gravedad (TB6612FNG) € 11,60
DFRobot Gravedad: controlador de motor de CC de 2 x 1,2 A con conector de gravedad (TB6612FNG) € 11,60 Preguntas y respuestas
Q
Opiniones de los usuarios
DFRobot Gravedad: controlador de motor de CC de 2 x 1,2 A con conector de gravedad (TB6612FNG) ★★★★★Haz clic en una estrella para dejar tu opinión.
- En stock DFRobot Cargador Lipo-Tipo C € 7,25 Ver el producto
- En stock DFRobot Cable EL - Rojo - 1 metro € 9,- Ver el producto
- En stock DFRobot Gravedad: Sensor de temperatura y humedad DHT22 € 11,- Ver el producto
- Reducido En stock -5 % DFRobot Gravedad: sensor de vibración de disco piezoeléctrico digital € 6,05 € 5,75 Ver el producto
- En stock DFRobot Kit para principiantes para Arduino (mejor kit de inicio) € 43,- Ver el producto
- Reducido En stock -65 % DFRobot Gravedad: gesto y sensor táctil € 13,95 € 4,85 Ver el producto
- 10 piezas En stock DFRobot Gravedad: cable de sensor I2C/UART de 4 pines para Arduino - 50 cm (paquete de 10) € 8,- Ver el producto
- En stock Microservo DFRobot DF9GMS de 360 grados (1,6 kg) € 5,- Ver el producto
- En stock DFRobot Gravedad: módulo de relé digital 10A € 5,- Ver el producto
- En stock DFRobot Motor CC sin escobillas MTO1804 (CCW) € 35,75 Ver el producto
- En stock DFRobot Carcasa ABS Transparente para Arduino UNO R3 (Compatible con LEGO) € 5,- Ver el producto
- En stock DFRobot Sensor fotoeléctrico de nivel de agua/líquido por gravedad para Arduino € 8,50 Ver el producto
- En stock DFRobot Portapilas - 3 pilas AA con interfaz MicroUSB € 2,35 Ver el producto
- Rebaja En stock -66 % DFRobot Gravedad: Botón LED - Azul € 7,30 € 2,45 Ver el producto
- Reducido En stock -19 % DFRobot Gravedad: sensor de llama analógico para Arduino € 4,85 € 3,95 Ver el producto