









Controlador de motor de alta potencia Pololu Dual G2 18v18 para Raspberry Pi (ensamblado)
Descripción Enlaces Archivos adjuntos
Esta placa complementaria facilita el control de dos motores de CC de alta potencia con una Raspberry Pi. Sus puentes H MOSFET discretos gemelos admiten un amplio rango operativo de 6,5 V a 30 V y son lo suficientemente eficientes como para proporcionar 18 A continuos sin un disipador de calor. Los controladores ofrecen una funcionalidad básica de limitación de corriente y aceptan frecuencias PWM ultrasónicas para un funcionamiento más silencioso. Las asignaciones de pines predeterminadas facilitan el inicio, pero se pueden personalizar para aplicaciones más especializadas. Esta versión se envía completamente ensamblada con conectores soldados.
La tensión de funcionamiento mínima para las cuatro versiones es de 6,5 V, mientras que las tensiones de funcionamiento máximas se indican en la tabla anterior. La placa también incluye un regulador reductor de conmutación integrado de 5 V y 2,5 A que se puede usar para alimentar el Raspberry Pi al que está conectado, lo que permite el funcionamiento desde una sola fuente de alimentación.
La configuración predeterminada del controlador usa seis pines GPIO para controlar los controladores del motor, haciendo uso de las salidas PWM del hardware de Raspberry Pi, y usa dos pines adicionales para leer las salidas de estado de los controladores. Sin embargo, las asignaciones de pines se pueden personalizar si los valores predeterminados no son convenientes, y se puede acceder a los pines para la detección y limitación de corriente en la placa para aplicaciones más avanzadas.
La placa coincide con la especificación mecánica HAT (Hardware Attached on Top) de Raspberry Pi, aunque no se ajusta a las especificaciones HAT completas debido a la falta de una EEPROM ID. (Hay disponible un espacio para agregar su propia EEPROM para aplicaciones en las que sería útil; se proporcionan pull-ups en SDA, SCL y WP). No es práctico usar esta placa de expansión con el Raspberry Pi Modelo A original o el Modelo B debido a las diferencias en su pinout y factor de forma.
Estos controladores de motor dual también están disponibles como protectores Arduino. Para versiones de un solo canal en un factor de forma más compacto, considere nuestros controladores de motor de alta potencia. Para alternativas más pequeñas, de menor potencia y de menor costo diseñadas para una Raspberry Pi, considere nuestro Controlador de motor dual MC33926 para Raspberry Pi, Controlador de motor dual MAX14870 para Raspberry Pi y Controlador de motor dual DRV8835 para Raspberry Pi.
Características comunes a todas las versiones
- Funcionamiento PWM hasta 100 kHz
- Los LED indicadores del motor muestran lo que están haciendo las salidas incluso cuando no hay un motor conectado
- El regulador de voltaje reductor de conmutación integrado de 5 V, 2,5 A alimenta la base Raspberry Pi para una operación de suministro único
- Biblioteca de Python hace que sea fácil comenzar a usar esta placa como placa de expansión del controlador del motor
- Las asignaciones de pines GPIO se pueden personalizar si las asignaciones predeterminadas no son convenientes
- Los pines de detección y limitación de corriente están expuestos para uso avanzado
- Protección de voltaje inverso
- Apagado por bajo voltaje
- Protección contra cortocircuitos
Detalles para este artículo #3751
- Tensión de funcionamiento: 6,5 V a 30 V (máximo absoluto; no diseñado para uso con baterías de 24 V)
- Corriente de salida: 18 A continua
- Limitación de corriente activa (chopping) con un umbral predeterminado aproximado de 50 A (se puede ajustar más bajo)
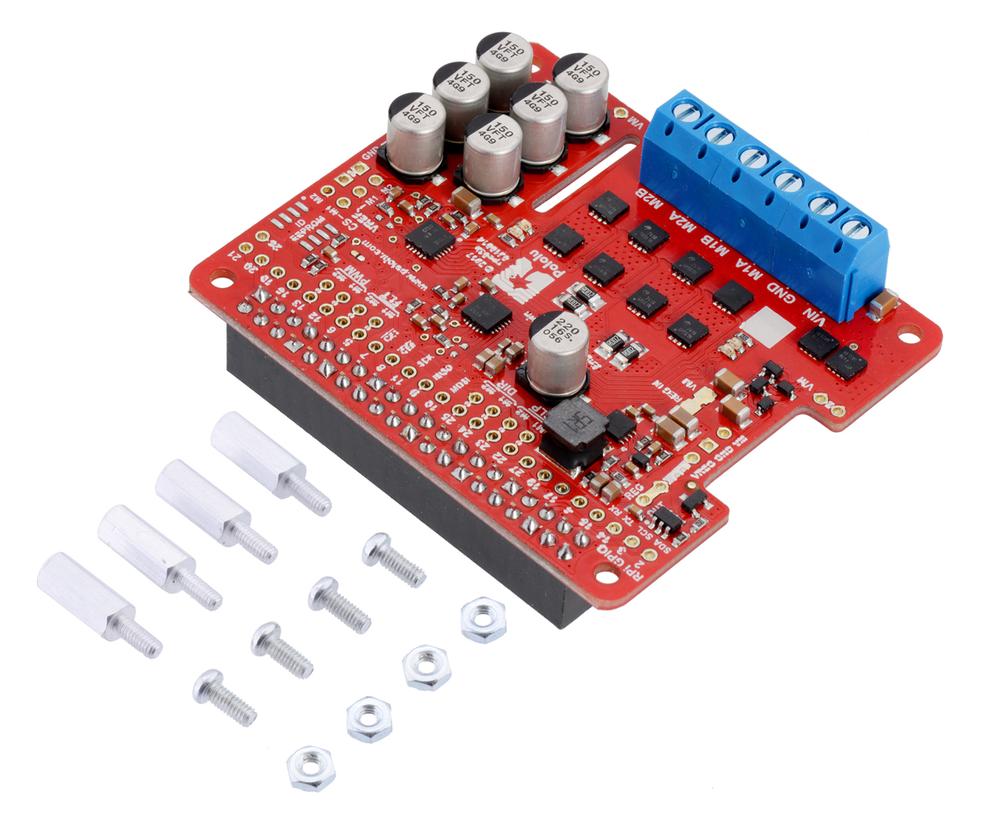
Esta versión del 18v18 conductor de motor es totalmente ensamblado, con un cabezal hembra de 0,1″ de 2 × 20 pines (para la interfaz Raspberry Pi) y una tira de seis pines de bloques de terminales de 5 mm (para la alimentación de la placa y las salidas del motor) soldados. Se puede distinguir de las otras versiones por su rojo PCB y el número 150 encima de los seis condensadores electrolíticos plateados altos en la esquina del tablero. (Vea el artículo #3750 para una versión de kit con conectores incluidos pero no soldados).
Se incluyen cuatro separadores M2.5 (11 mm de largo), tornillos y tuercas para asegurar la placa a la Raspberry Pi a la altura adecuada para el conector GPIO.
Se pueden usar bloques de cortocircuito y cabezales macho de 0,1″ (no incluidos) para realizar algunas de las modificaciones opcionales más avanzadas en la placa, como reasignar los pines de control.
El controlador del motor incluye seis capacitores de potencia electrolítica de 100 μF o 150 μF, y hay espacio para agregar capacitores adicionales (por ejemplo, para compensar los cables de alimentación largos o aumentar la estabilidad de la fuente de alimentación). Por lo general, no se necesitan capacitores de potencia adicionales, y no se incluyen capacitores adicionales con este controlador de motor.
Una Raspberry Pi es no incluido.
Energía
Se debe conectar una fuente de alimentación de motor adecuada a las almohadillas VIN y GND grandes del controlador del motor. La placa incluye un circuito de protección de voltaje inverso que ayuda a prevenir daños en caso de que la fuente de alimentación del motor se conecte al revés. Se puede acceder al voltaje de entrada con protección inversa para su uso en otros circuitos a través de los dos pines etiquetados como VM en el lado izquierdo de la placa. De forma predeterminada, la fuente de alimentación del motor también alimenta un regulador reductor de conmutación de 5 V y 2,5 A que proporciona energía a la Raspberry Pi conectada.
Un circuito de diodo ideal en esta placa evita que la corriente inversa fluya hacia el suministro de 5 V de la placa del controlador del motor si la Raspberry Pi se alimenta por separado (por ejemplo, a través de su receptáculo de alimentación USB). Sin embargo, a partir de Raspberry Pi 3 Model B+, no hay un circuito de diodo ideal correspondiente en la entrada de alimentación USB de Raspberry Pi, por lo que es posible que la placa del controlador retroalimente un adaptador de alimentación USB a través de Raspberry Pi. Como resultado, no recomendamos conectar la alimentación USB externa a la Raspberry Pi mientras recibe alimentación a través del controlador del motor.
La retroalimentación no es un problema con las versiones anteriores de Raspberry Pi, que tienen un circuito de diodo en la entrada de alimentación USB. Con las versiones de Raspberry Pi anteriores a Pi 3 B+, es seguro tener una fuente de alimentación diferente conectada a Raspberry Pi a través de su receptáculo USB mientras el controlador del motor está conectado y alimentado.
Si desea alimentar la Raspberry Pi por separado, el regulador se puede desconectar cortando dos pistas expuestas en la placa: una entre las almohadillas de montaje en superficie etiquetadas como "VM" y "REG IN", y otra entre los dos pines por el " REG OUT”, como se muestra a la derecha. En las versiones 24v14 y 24v18, la desconexión del regulador aumenta la tensión máxima absoluta de funcionamiento de la placa a 40 V.
Opciones de control de motores
Con el pin PWM mantenido bajo, ambas salidas del motor se mantendrán bajas (una operación de freno). Con PWM alto, las salidas del motor se controlarán de acuerdo con la entrada DIR. Esto permite dos modos de operación: magnitud de signo, en el que el ciclo de trabajo PWM controla la velocidad del motor y DIR controla la dirección, y antifase bloqueado, en el que se aplica una señal modulada por ancho de pulso al pin DIR con PWM en alto.
En la operación en antifase bloqueada, un ciclo de trabajo bajo impulsa el motor en una dirección y un ciclo de trabajo alto impulsa el motor en la otra dirección; un ciclo de trabajo del 50% apaga el motor. Una implementación exitosa de antifase bloqueada depende de que la inductancia del motor y la frecuencia de conmutación suavicen la corriente (por ejemplo, haciendo que la corriente sea cero en el caso de un ciclo de trabajo del 50 %), por lo que es posible que se requiera una frecuencia PWM alta.
Frecuencia PWM
El controlador de motor admite frecuencias PWM de hasta 100 kHz, pero tenga en cuenta que las pérdidas de conmutación en el controlador serán proporcionales a la frecuencia PWM. Por lo general, alrededor de 20 kHz es una buena opción para la operación de magnitud de señal, ya que es lo suficientemente alta como para ser ultrasónica, lo que da como resultado una operación más silenciosa.
Un pulso en el pin PWM debe ser alto durante una duración mínima de aproximadamente 0,5 µs antes de que las salidas se enciendan durante la duración correspondiente (cualquier pulso de entrada más corto no produce un cambio en las salidas), por lo que los ciclos de trabajo bajos no están disponibles a altas frecuencias. . Por ejemplo, a 100 kHz, el período del pulso es de 10 µs y el ciclo de trabajo mínimo distinto de cero que se puede lograr es 0,5/10, o 5 %.
Condiciones de falla
El controlador del motor puede detectar varios estados de falla que informa al conducir el pin FLT a nivel bajo; esta es una salida de drenaje abierto que debe elevarse al voltaje lógico de su sistema. Las fallas detectables incluyen cortocircuitos en las salidas, bajo voltaje y sobrecalentamiento. Todas las fallas desactivan las salidas del motor pero no están bloqueadas, lo que significa que el controlador intentará reanudar la operación cuando se elimine la condición de falla (o después de una demora de unos pocos milisegundos en el caso de una falla de cortocircuito). El fallo de sobrecalentamiento proporciona una indicación débil de que la placa está demasiado caliente, pero no indica directamente la temperatura de los MOSFET, que suelen ser los primeros componentes en sobrecalentarse, por lo que no debe contar con este fallo para evitar daños por sobrecalentamiento. -condiciones de temperatura.
Pines de reasignación
Todos los pines GPIO de Raspberry Pi se dividen a lo largo de una fila de orificios pasantes numerados justo debajo del conector GPIO de 40 pines. Cada pin GPIO utilizado por la placa está conectado desde esta fila al pin del controlador del motor correspondiente mediante un trazo en el lado superior de la placa que abarca el par de orificios. Si desea reasignar uno de estos pines del controlador del motor, puede cortar su rastro con un cuchillo y luego pasar un cable desde el orificio inferior a un nuevo pin GPIO.
Tenga en cuenta que las asignaciones de pines predeterminadas se eligieron para que los pull-ups y pull-downs de GPIO predeterminados de Raspberry Pi coincidan con la dirección en la que se tiran o se deben tirar los pines del controlador del motor (hacia arriba para SF, hacia abajo para otros); Si reasigna los pines del controlador del motor sin prestar atención a esto, es posible que tenga problemas con los pines tirados de manera incorrecta. Ver el documentación Raspberry Pi para obtener más información sobre los estados GPIO predeterminados.
Detección y limitación de corriente
El controlador del motor expone pines limitadores y de detección de corriente que no están conectados a la Raspberry Pi, pero se puede acceder a ellos a través de sus propios orificios pasantes en caso de que quiera usarlos en una aplicación más avanzada.
El controlador tiene la capacidad de limitar la corriente del motor mediante el corte de corriente: una vez que la corriente del controlador del motor alcanza un umbral establecido, el controlador entra en modo de freno (decaimiento lento) durante aproximadamente 25 μs antes de aplicar potencia para impulsar el motor nuevamente. Esto hace que sea más práctico usar el controlador con un motor que puede consumir solo unos pocos amperios mientras está en funcionamiento, pero puede consumir muchas veces esa cantidad (decenas de amperios) al arrancar.
En esta placa (18v18), el umbral de limitación de corriente nominal se establece en unos 50 A por defecto. Para cada canal del motor, puede reducir el límite conectando una resistencia adicional entre el pin VREF y el pin GND adyacente; el siguiente gráfico muestra cómo el límite de corriente se relaciona con el valor de la resistencia VREF. Por ejemplo, agregar una resistencia de 100 kΩ entre VREF y GND reduce el límite de corriente a aproximadamente 29 A. Tenga en cuenta que el umbral de limitación de corriente no es muy preciso y es menos preciso en configuraciones especialmente bajas (indicadas por la parte punteada de la curva) .
Los pines de detección de corriente del controlador, etiquetados como CS, emiten voltajes proporcionales a las corrientes del motor mientras los puentes H están funcionando. El voltaje de salida para esta versión es de unos 20 mV/A más una pequeña desviación, que suele ser de unos 50 mV.
Cada salida CS solo está activa mientras el puente H correspondiente está en modo de conducción; está inactivo (bajo) cuando el canal está en modo freno (caída lenta), lo que sucede cuando la entrada PWM es baja o cuando la limitación de corriente está activa. La corriente continuará circulando a través del motor cuando el controlador comience a frenar, pero el voltaje en el pin CS no reflejará con precisión la corriente del motor en el modo de frenado. El controlador del motor usa internamente el voltaje CS, por lo tanto, para evitar interferir con la operación del controlador, no debe agregar un capacitor a este pin ni conectar una carga que extraiga más de unos pocos mA de él.
Consideraciones de disipación de energía en el mundo real
Los MOSFET pueden manejar grandes picos de corriente durante períodos breves (por ejemplo, 100 A durante unos pocos milisegundos), y el corte de corriente del controlador mantendrá la corriente promedio por debajo del límite establecido. Las clasificaciones máximas son para transitorios rápidos (por ejemplo, cuando un motor se enciende por primera vez), y la clasificación continua depende de varias condiciones, como la temperatura ambiente. PWMing el motor introducirá calentamiento adicional proporcional a la frecuencia. La corriente real que puede entregar dependerá de qué tan bien pueda mantener frío el controlador del motor. La placa de circuito impreso del controlador está diseñada para extraer calor de los MOSFET, pero el rendimiento se puede mejorar agregando un disipador de calor o flujo de aire. Para instalaciones de alta corriente, los cables del motor y de la fuente de alimentación también deben soldarse directamente en lugar de pasar por los bloques de terminales suministrados, que tienen una capacidad nominal de hasta 16 A.
Advertencia: Este controlador de motor no tiene apagado por sobretemperatura. Una condición de sobretemperatura o sobrecorriente puede causar daño permanente al conductor del motor. Puede considerar usar la salida de detección de corriente integrada del controlador (con un ADC externo) o un sensor de corriente externo para monitorear su consumo de corriente.
Propiedades
| Marca | Pololu |
| Modelo | 3751 |
Entregado en 5 a 7 días
 Controlador de motor de alta potencia Pololu Dual G2 18v18 para Raspberry Pi (ensamblado) Entregado en 5 a 7 días € 100,70
Controlador de motor de alta potencia Pololu Dual G2 18v18 para Raspberry Pi (ensamblado) Entregado en 5 a 7 días € 100,70 Productos similares
- Escudo de controlador de motor de alta potencia Pololu Dual G2 18v22 para Arduino € 140,20 Ver el producto
- Controlador de motor de alta potencia Pololu Dual G2 18v18 Shield para Arduino € 100,70 Ver el producto
- Controlador de motor de alta potencia Pololu G2 24v21 € 77,- Ver el producto
- Escudo de controlador de motor de alta potencia Pololu Dual G2 24v14 para Arduino € 107,30 Ver el producto
- Pololu Controlador de Motor Simple de Alta Potencia G2 18v15 (Conectores Soldados) € 123,80 Ver el producto
- Pololu Controlador de motor USB Jrk G2 18v27 con retroalimentación € 131,30 Ver el producto
- Controlador de motor de alta potencia Pololu Dual G2 18v22 para Raspberry Pi (kit parcial) € 127,05 Ver el producto
- Controlador de motor de alta potencia Pololu G2 18v17 € 61,20 Ver el producto
- Pololu Controlador de motor USB Jrk G2 24v13 con retroalimentación € 146,80 Ver el producto
- Pololu Controlador de motor simple de alta potencia G2 24v19 € 144,40 Ver el producto
- Controlador de motor de alta potencia Pololu Dual G2 24v14 para Raspberry Pi (kit parcial) € 100,70 Ver el producto
- Controlador de motor de alta potencia Pololu Dual G2 18v18 para Raspberry Pi (kit parcial) € 94,15 Ver el producto
- Escudo de controlador de motor de alta potencia Pololu Dual G2 24v18 para Arduino € 140,20 Ver el producto
- Pololu Controlador de Motor Simple de Alta Potencia G2 24v12 (Conectores Soldados) € 123,90 Ver el producto
- Pololu Controlador de motor simple de alta potencia G2 18v15 € 179,80 Ver el producto
- Controlador de motor de alta potencia Pololu Dual G2 24v18 para Raspberry Pi (kit parcial) € 127,05 Ver el producto
- Controlador de motor de alta potencia Pololu G2 18v25 € 77,- Ver el producto
- Pololu Controlador de motor USB Jrk G2 21v3 con retroalimentación (conectores soldados) € 77,- Ver el producto
- Pololu Controlador de motor simple de alta potencia G2 18v25 € 144,70 Ver el producto
- Pololu Controlador de motor USB Jrk G2 24v21 con retroalimentación € 199,50 Ver el producto
- Controlador de motor de alta potencia Pololu Dual G2 24v14 para Raspberry Pi (ensamblado) € 107,30 Ver el producto
- Pololu Controlador de motor de alta potencia G2 24v13 € 61,20 Ver el producto
- Pololu Controlador de motor USB Jrk G2 18v19 con retroalimentación € 146,80 Ver el producto
- Pololu Controlador de motor simple de alta potencia G2 24v12 € 179,80 Ver el producto
Preguntas y respuestas
Opiniones de los usuarios
- Reducido En stock -50 % Pololu DRV8838 Portador de controlador de motor DC cepillado simple € 6,95 € 3,50 Ver el producto
- Reducido En stock -50 % Regulador de voltaje elevador Pololu 3.3V U1V10F3 € 9,75 € 4,90 Ver el producto
- Reducido En stock -50 % Regulador de voltaje reductor Pololu 3.3V, 500mA D24V5F3 € 12,55 € 6,30 Ver el producto
- Reducido En stock -50 % Pololu Regulador de voltaje de aumento/reducción de 5 V S18V20F5 € 42,05 € 21,05 Ver el producto
- Reducido En stock -50 % Pololu Regulador de voltaje elevador de 5V U3V16F5 € 9,75 € 4,90 Ver el producto
- Reducido En stock -50 % Pololu Cable plano Cables de puente premium 10 colores FF 6" (15 cm) € 4,- € 2,- Ver el producto
- Reducido 3 piezas En stock -50 % Pololu Bloque de terminales sin tornillos: 3 pines, paso de 0,1″, entrada lateral (paquete de 3) € 3,60 € 1,80 Ver el producto
- Reducido En stock -50 % Pololu Cable trenzado: rojo, 28 AWG, 90 pies € 14,- € 7,- Ver el producto
- Reducido En stock -50 % Pololu Rueda 32×7mm Par - Blanco € 6,25 € 3,15 Ver el producto
- Reducido 5 piezas En stock -49 % Pololu Mini interruptor pulsador: montaje en PCB, 2 pines, SPST, 50 mA (paquete de 5) € 2,95 € 1,50 Ver el producto
- Reducido En stock -49 % Pololu Mini interruptor deslizante: 3 pines, SPDT, 0,3 A (paquete de 3) € 3,35 € 1,70 Ver el producto
- Reducido En stock -50 % Pololu Regulador de voltaje reductor de 5 V, 500 mA D24V5F5 € 12,55 € 6,30 Ver el producto
- Reducido En stock -48 % Pololu Conector macho separable de 0,100" (2,54 mm): 1 × 40 pines, recto, blanco € 1,55 € 0,80 Ver el producto
- Reducido En stock -50 % Pololu Cable trenzado: blanco, 20 AWG, 40 pies € 16,80 € 8,40 Ver el producto
- Reducido En stock -50 % Pololu Espaciador de nailon: 4 mm de longitud, 4 mm de DE, 2,7 mm de DI (paquete de 50) € 4,70 € 2,35 Ver el producto