









Sensor Sparkfun RedBot - Parachoques mecánico
Descripción Archivos adjuntos
El sensor mecánico del parachoques está equipado con un cabezal de tres pines. Esto permite una conexión directa a la placa base RedBot mediante cables de puente hembra a hembra. Con la biblioteca RedBot, es fácil programar su robot para sortear obstáculos de manera eficiente.
Es importante tener en cuenta que la mayoría de los tutoriales de RedBot recomiendan el uso de dos sensores de parachoques mecánicos. Tenga esto en cuenta al decidir la cantidad de su pedido.
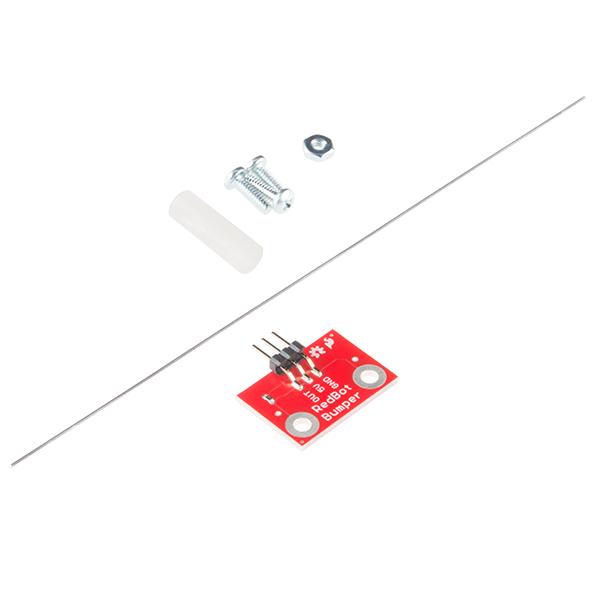
El paquete incluye:
- Un tablero de parachoques mecánico
- un bigote
- Un separador de nailon 4-40 de 19,05 mm
- Una tuerca hexagonal 4-40
- Tres tornillos para máquina Phillips 4-40 de 9,53 mm
El sensor de parachoques mecánico tiene un tamaño compacto de 26,27 x 17,67 mm, lo que lo hace perfecto para su RedBot.
Para obtener información más detallada, puede acceder al esquema, los archivos Eagle, la Guía de experimentos de RedBot, la Guía de ensamblaje del chasis RedBot Shadow y GitHub desde el sitio web de Sparkfun . También puede ver el vídeo del producto para ver el sensor de parachoques mecánico en acción.
El sensor Sparkfun RedBot - Parachoques mecánico es una pequeña adición que puede marcar una gran diferencia en el rendimiento de su robot. Es una herramienta esencial para cualquier constructor de robots que busque mejorar la navegación de su RedBot y evitar posibles colisiones.
Propiedades
| Marca | Sparkfun |
| Modelo | SEN-11999 |
| Más información | GitHub - sparkfun/RedBot_Whisker_Bumper: Super-simple board to provide the RedBot with a mechanical whisker to detect collisions. |
| Largo | 100 mm |
| Ancho | 130 mm |
| Altura | 7 mm |
| Peso | 14,2 g |
Entregado en 5 a 7 días
 Sensor Sparkfun RedBot - Parachoques mecánico Entregado en 5 a 7 días € 4,85
Sensor Sparkfun RedBot - Parachoques mecánico Entregado en 5 a 7 días € 4,85 Preguntas y respuestas
Opiniones de los usuarios
- Reducido En stock -50 % Sparkfun Conector de audio de 3,5 mm. € 2,50 € 1,25 Ver el producto
- Reducido En stock -49 % Sparkfun Kit de encabezados Raspberry Pi Pico € 2,25 € 1,15 Ver el producto
- Reducido En stock -47 % Sparkfun Portapilas - 1xAAA (PTH) € 0,75 € 0,40 Ver el producto
- Reducido En stock -45 % Sparkfun Condensador Cerámico 0.1uF € 0,55 € 0,30 Ver el producto
- Reducido En stock -49 % Sparkfun Kit de cabecera apilable Arduino - R3 € 3,75 € 1,90 Ver el producto
- Reducido En stock -49 % Sparkfun Interruptor basculante - SPST (ángulo recto) € 1,75 € 0,90 Ver el producto
- Reducido En stock -49 % Sparkfun Conectores separables: macho de 40 pines (centrado en largo, PTH, 0,1") € 2,25 € 1,15 Ver el producto
- Reducido En stock -50 % Desbloqueo de microSD con cambio de nivel Sparkfun € 9,- € 4,50 Ver el producto
- Reducido En stock -50 % Desconexión IMU Sparkfun Micro 6DoF - BMI270 (Qwiic) € 24,- € 12,- Ver el producto
- Reducido En stock -50 % Sparkfun Arduino Pro Mini 328 - 5V/16MHz € 15,50 € 7,75 Ver el producto
- Reducido En stock -50 % Desconexión del sensor de línea Sparkfun - QRE1113 (Digital) € 6,25 € 3,15 Ver el producto
- Reducido 2 piezas En stock -50 % Sparkfun Juego de cabezales apilables ESP32 Thing € 3,50 € 1,75 Ver el producto
- Reducido En stock -50 % Sparkfun Cable de conexión: amarillo (22 AWG) € 4,50 € 2,25 Ver el producto
- Reducido En stock -50 % Sparkfun Cable de conexión: marrón (22 AWG) € 5,25 € 2,65 Ver el producto
- Reducido En stock -50 % Sparkfun Rectificador de diodo - 1A, 50V (1N4001) € 0,50 € 0,25 Ver el producto