









Pololu Controlador de motor RoboClaw 2x60AHV, 60 V CC (V7B)
Descripción
Los RoboClaws de Basicmicro (anteriormente Ion Motion Control) son una familia de controladores de motores regenerativos sincrónicos, versátiles y eficientes. Pueden alimentar motores CC con escobillas de 7,5 A, 15 A, 30 A, 45 A, 60 A o 120 A continuos (según modelo) a tensiones de 6 V a 34 V o de 10,5 V a 60 V (también según el modelo), y permiten picos de corriente muy por encima de las clasificaciones continuas máximas. Las versiones "Solo" cuentan con un solo canal de control de motor, mientras que las versiones duales (indicadas con "2x" en sus nombres) ofrecen dos canales para controlar un par de motores.
Los RoboClaws tienen una interfaz USB que actúa como un puerto serie virtual (COM), lo que permite controlarlo directamente desde una computadora, y cuentan con comandos integrados para controlar la aceleración, desaceleración, distancia, velocidad, sentido de corriente, límites de voltaje y más. El RoboClaw también admite otros modos de interfaz: se puede controlar a través de la serie TTL para usar con sistemas integrados, servopulsos RC hobby para usar como control electrónico de velocidad (ESC) controlado por RC o voltajes analógicos para usar con potenciómetros. o joysticks analógicos.
RoboClaw admite automáticamente niveles lógicos de 3,3 V o 5 V, interruptores de final de carrera, interruptores de inicio, interruptores de parada de emergencia, fuentes de alimentación, sistemas de frenado y contactores. Las fuentes de alimentación se pueden usar habilitando la función de control de sujeción de voltaje incorporada. Un BEC de modo de conmutación integrado suministra 5 V CC hasta 1,2 A o 3 A (según el modelo del controlador) para alimentar los dispositivos del usuario.
Los RoboClaws se pueden operar sin retroalimentación para el control de velocidad de lazo abierto, o se pueden usar con una variedad de tipos de retroalimentación para la velocidad de lazo cerrado o el control de posición. Se admiten codificadores de cuadratura con hasta 19,6 millones de pulsos por segundo y se pueden ajustar automáticamente con Ion Studio, que es una aplicación descargable gratuita. Además, se admite una amplia gama de entradas de sensores, como potenciómetros y codificadores absolutos. La funcionalidad de circuito cerrado de RoboClaw crea un control absoluto sobre la velocidad y la dirección, independientemente de los cambios de carga.
RoboClaw incorpora varias características de protección que incluyen límites de temperatura, corriente, sobrevoltaje y bajo voltaje. Se proporcionan varias configuraciones definibles por el usuario, como el límite de corriente máxima, los voltajes de batería máximos y mínimos, para un control más refinado.
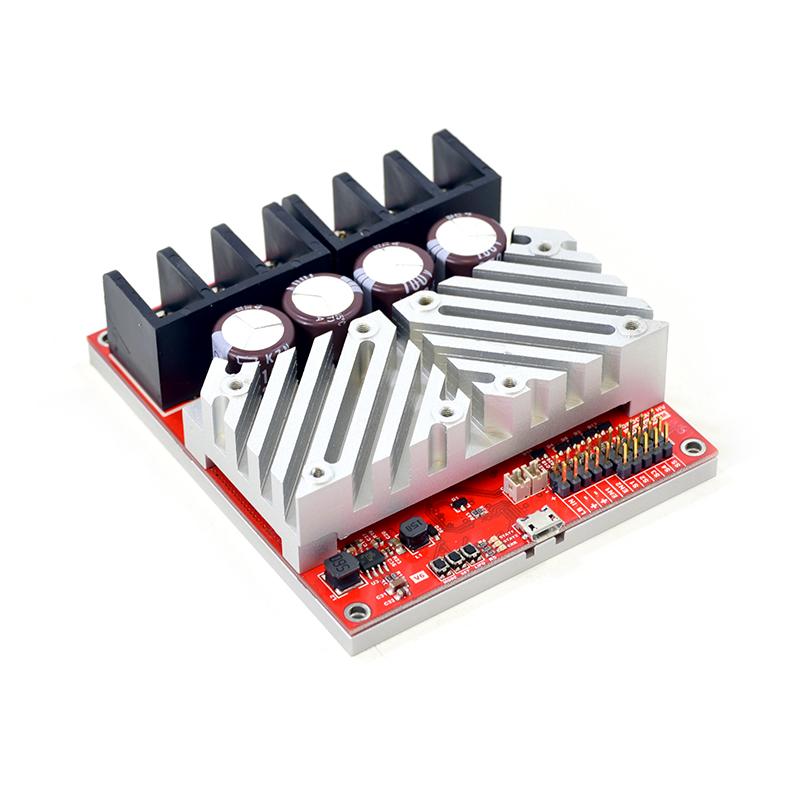
Con un rango de suministro operativo de 10,5 V a 60 V, el RoboClaw 2x60AHV es una versión de mayor voltaje del 2x60A (V6), que opera de 6 V a 34 V. El 2x60AHV, que a veces también se escribe como AT 2x60A, también tiene un disipador de calor ligeramente modificado, que cuenta con varios orificios roscados que se pueden usar para montar directamente un par de ventiladores de refrigeración. Aparte de las protuberancias submilimétricas que rodean cada orificio roscado, las dimensiones exteriores del disipador de calor siguen siendo las mismas. Este RoboClaw cuenta con un conector USB Micro-B que funciona con nuestros cables USB micro-B.
Características clave de la familia RoboClaw
Los RoboClaws tienen una interfaz USB que actúa como un puerto serie virtual (COM), lo que permite controlarlo directamente desde una computadora, y cuentan con comandos integrados para controlar la aceleración, desaceleración, distancia, velocidad, sentido de corriente, límites de voltaje y más. El RoboClaw también admite otros modos de interfaz: se puede controlar a través de la serie TTL para usar con sistemas integrados, servopulsos RC hobby para usar como control electrónico de velocidad (ESC) controlado por RC o voltajes analógicos para usar con potenciómetros. o joysticks analógicos.
RoboClaw admite automáticamente niveles lógicos de 3,3 V o 5 V, interruptores de final de carrera, interruptores de inicio, interruptores de parada de emergencia, fuentes de alimentación, sistemas de frenado y contactores. Las fuentes de alimentación se pueden usar habilitando la función de control de sujeción de voltaje incorporada. Un BEC de modo de conmutación integrado suministra 5 V CC hasta 1,2 A o 3 A (según el modelo del controlador) para alimentar los dispositivos del usuario.
Los RoboClaws se pueden operar sin retroalimentación para el control de velocidad de lazo abierto, o se pueden usar con una variedad de tipos de retroalimentación para la velocidad de lazo cerrado o el control de posición. Se admiten codificadores de cuadratura con hasta 19,6 millones de pulsos por segundo y se pueden ajustar automáticamente con Ion Studio, que es una aplicación descargable gratuita. Además, se admite una amplia gama de entradas de sensores, como potenciómetros y codificadores absolutos. La funcionalidad de circuito cerrado de RoboClaw crea un control absoluto sobre la velocidad y la dirección, independientemente de los cambios de carga.
RoboClaw incorpora varias características de protección que incluyen límites de temperatura, corriente, sobrevoltaje y bajo voltaje. Se proporcionan varias configuraciones definibles por el usuario, como el límite de corriente máxima, los voltajes de batería máximos y mínimos, para un control más refinado.
Con un rango de suministro operativo de 10,5 V a 60 V, el RoboClaw 2x60AHV es una versión de mayor voltaje del 2x60A (V6), que opera de 6 V a 34 V. El 2x60AHV, que a veces también se escribe como AT 2x60A, también tiene un disipador de calor ligeramente modificado, que cuenta con varios orificios roscados que se pueden usar para montar directamente un par de ventiladores de refrigeración. Aparte de las protuberancias submilimétricas que rodean cada orificio roscado, las dimensiones exteriores del disipador de calor siguen siendo las mismas. Este RoboClaw cuenta con un conector USB Micro-B que funciona con nuestros cables USB micro-B.
Características clave de la familia RoboClaw
- Control bidireccional simple de uno o dos motores de CC con escobillas, según el modelo de controlador
- Rango de suministro operativo de 6 V a 34 V o de 10,5 V a 60 V, según el modelo de controlador
- Salida de corriente continua máxima de 7,5 A a 120 A, según el modelo de controlador
- Los controladores de dos canales admiten el puenteo de canales para permitir el control de un solo motor con el doble de capacidad de corriente
- La limitación de corriente automática reduce el ciclo de trabajo cuando la temperatura supera los 85 °C
- Cuatro opciones de comunicación o control:
- Interfaz serie USB (puerto COM virtual)
- Interfaz serial de nivel lógico (TTL) para conexión directa a microcontroladores u otros controladores integrados
- Interfaz de ancho de pulso de control de radio (RC) para conexión directa a un receptor RC o Servocontrolador RC
- Interfaz de voltaje analógico (0 V a 2 V, tolerante a 5 V) para conexión directa a potenciómetros y joysticks analógicos
- Entradas de retroalimentación duales para control de lazo cerrado PID:
- Control de velocidad o posición con codificadores de cuadratura, hasta 19,6 millones de pulsos de codificador por segundo
- Control de posición con codificadores analógicos o potenciómetros
- (Control de lazo abierto sin retroalimentación también disponible)
- Terminales de tornillo para conexión/desconexión rápida
- Configurable mediante interfaz de pulsador o conexión USB y software para PC
- Frenado regenerativo
- Tolera cambios de dirección de alta velocidad
- Puente seleccionable 5 V BEC
- El monitoreo de la batería y el corte por bajo voltaje protegen las baterías de una descarga excesiva.
Propiedades
Información de la marca
| Marca | Pololu |
| Modelo | 3583 |
€ 407,65€ 336,90 Excl. IVA (ES)
No se conoce ETA
cable micro USB
Mostrar más resultados
 Pololu Controlador de motor RoboClaw 2x60AHV, 60 V CC (V7B) € 407,65
Pololu Controlador de motor RoboClaw 2x60AHV, 60 V CC (V7B) € 407,65 Productos similares
- Pololu Controlador de motor RoboClaw Solo 300A, 60 VCC € 547,90 Ver el producto
- Pololu Controlador de motor RoboClaw 2x45A (V5E, E/S de cabezal de pines) € 210,40 Ver el producto
- Pololu Controlador de motor RoboClaw 2x30A (V5E) € 186,25 Ver el producto
- Pololu Controlador de motor RoboClaw 2x60A (V7) € 299,15 Ver el producto
- Pololu Controlador de motor RoboClaw ST 2x45A (V5E, E/S con terminal de tornillo) € 210,40 Ver el producto
- Pololu Controlador de motor RoboClaw Solo 30A € 98,60 Ver el producto
- Pololu Controlador de motor RoboClaw 2x15A (V5E) € 142,45 Ver el producto
- Pololu Controlador de motor RoboClaw 2x7A (V5C) € 126,- Ver el producto
- Pololu Controlador de motor RoboClaw Solo 60A € 131,45 Ver el producto
Productos relacionados
- En stock Opencircuit Cable micro USB 50cm azul € 1,50 Ver el producto
- En stock Opencircuit Cable micro USB 100cm azul - 30AWG € 3,20 Ver el producto
- Adafruit Cable USB micro B con LED - Azul y Verde € 8,50 Ver el producto
- Adafruit Cable USB micro B con LED - Azul y Rojo € 8,85 Ver el producto
- DFRobot Cable USB a microUSB 2.0 reversible con conectores antioxidantes € 4,- Ver el producto
Preguntas y respuestas
Q
Opiniones de los usuarios
Pololu Controlador de motor RoboClaw 2x60AHV, 60 V CC (V7B) ★★★★★Haz clic en una estrella para dejar tu opinión.
- En stock Regulador de voltaje elevador Pololu 3.3V U1V11F3 € 8,75 Ver el producto
- En stock Pololu Regulador de voltaje reductor de 5 V, 3,4 A D30V30F5 € 21,90 Ver el producto
- En stock Pololu Bloque de terminales de tornillo: 8 pines, paso de 0,1″, entrada lateral € 3,90 Ver el producto
- En stock Pololu Regulador de voltaje elevador/reductor S7V7F5 € 9,30 Ver el producto
- En stock Pololu Placa de conexión de conector USB 2.0 tipo C € 5,45 Ver el producto
- En stock Pololu Desplazador de nivel lógico, 4 canales, bidireccional € 3,85 Ver el producto
- En stock Regulador de voltaje reductor Pololu 3.3V, 2.6A D24V22F3 € 20,80 Ver el producto
- 100 piezas En stock Pololu Pasadores hembra de crimpado para carcasas de 0,1", paquete de 100 € 13,10 Ver el producto
- 100 piezas En stock Pololu Pasadores de engarce macho para carcasas de 0,1", paquete de 100 € 19,70 Ver el producto
- En stock Pololu Espaciador de nailon: 10 mm de longitud, 4 mm de DE, 2,7 mm de DI (paquete de 25) € 2,85 Ver el producto
- En stock Regulador de voltaje reductor Pololu 9V, 600mA D24V6F9 € 12,- Ver el producto
- En stock Pololu Miniinterruptor deslizante MOSFET con protección de voltaje inverso, LV € 4,95 Ver el producto
- En stock Pololu Cable trenzado: blanco, 20 AWG, 40 pies € 13,10 Ver el producto
- En stock Pololu Regulador de voltaje elevador/reductor de 5 V S8V9F5 € 10,90 Ver el producto
- En stock Regulador de voltaje elevador de 5V Pololu U1V10F5 € 7,65 Ver el producto